MAY
13
2014
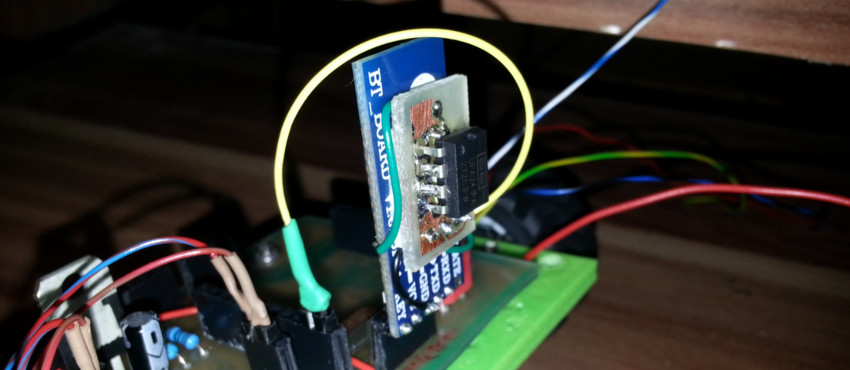
I and my friend Zenios Agapiou thought of constructing a simple two wheel balancer robot. At the beginning we thought we will just program our Atmega88pa micro-controller through standard JTAG. However, we quickly realized we have Bluetooth connected to the RX/TX device, so we thought whether we can upload Arduino bootloader to the atmega and program it wirelessly. However it wasn’t that simple as we initially anticipated.