MAR
08
2017
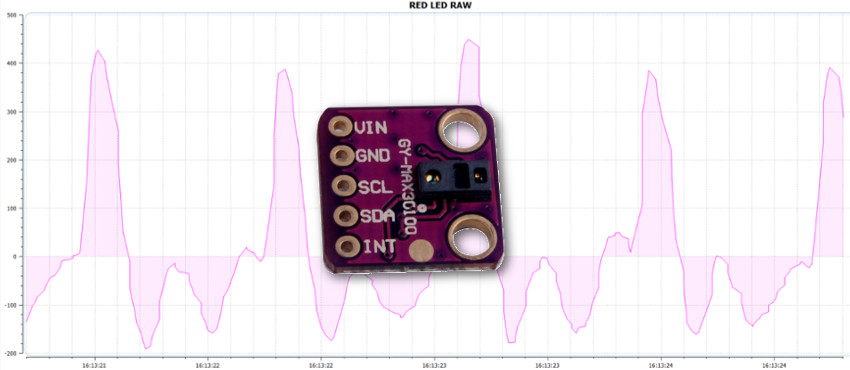
For my smart watch project I decided to experiment with sensors for reading pulse. Looking around I stumbled upon a sensor made by Maxim – MAX30100. For my surprise once I got my development board and delved into the sensor’s datasheet I discovered it’s not as simple as just wiring up the sensor to a microcontroller and reading the data. A lot of work you have to do yourself. In this tutorial, I’ll try to explain what I’ve learned about pulse oximeter and how to make sense of their data.