This was one of the most valuable projects I've ever done. Basically, because of this project I really got interested in electronics and learned all the basics about micro-controllers and other cool stuff.
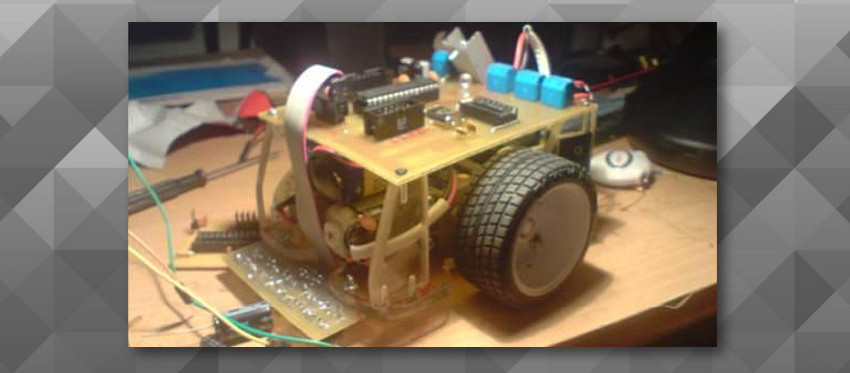
I made this robot for my high school scientefic research project with my dear friend. We got 3 - 1st places and 1 2nd place. Everything was made from scratch, we didn't use any kit to make this robot, except gearbox ![]() . Anyway, we designed the PCB, we printed (pressed) our own PCB in our kitchen. We designed the code for the robot. Only thing we did, was to research existing methods and tips and tricks for making a line follower robot. After finishing this project, of course it seems a pretty simple one, but it took us 5 month to complete it. When we first started we didn't have enough knowledge in electronics or micro-controller programming. I had only experience in computing olympiads and my friend some basic knowledge in electronics. I should thank my father as well, without him we would probably never finished the project in time.
. Anyway, we designed the PCB, we printed (pressed) our own PCB in our kitchen. We designed the code for the robot. Only thing we did, was to research existing methods and tips and tricks for making a line follower robot. After finishing this project, of course it seems a pretty simple one, but it took us 5 month to complete it. When we first started we didn't have enough knowledge in electronics or micro-controller programming. I had only experience in computing olympiads and my friend some basic knowledge in electronics. I should thank my father as well, without him we would probably never finished the project in time.
I remember, while making this robot, I wanted to make it's CPU to run faster to use the external oscillator. For AVR micros that means you have to write fuses. And 3 days before the firs presentation I wrote the wrong fuses and broke the robot, I thought beyond repair. Thanks to my father, he found a way how to make HVPP (High-voltage parallel programmer) on atmega8 and reset my robots atmega 168 fuses just one day before presentation. Yeah I had extra atmega8 lying around, but unfortunatelly when we designed the PCB we were using PWM pins for motor speed control which are only there for atmega168 for atmega8 they are located in different place. That was stresfull ![]() ! Anyway, you can download the paper down below, in latvian of course, but there is annotation in english as well and all the schematics + "the brains".
! Anyway, you can download the paper down below, in latvian of course, but there is annotation in english as well and all the schematics + "the brains".
Download: ZPD_toms_raivis_liepaja.pdf (1.54M)
And here is video of my robot "Gutsy" (named after one of the ubuntu distributions, geeky right? )









