JUN
17
2014
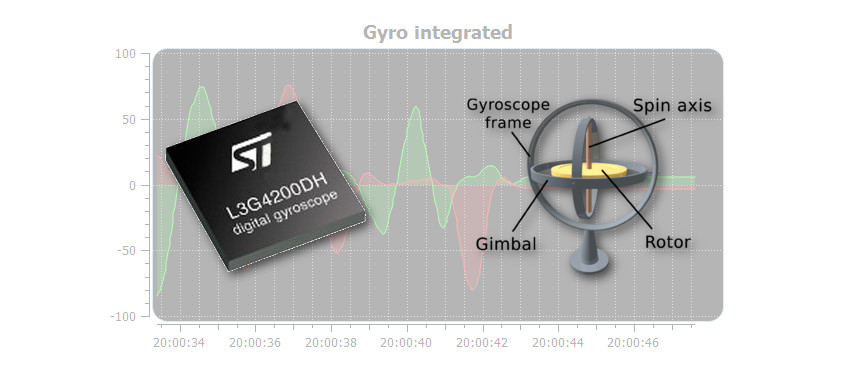
For most of the people probably the next step in the world of MEMS is to interface gyroscope. Most likely use gyroscope data to fuse with accelerometer data. If you have implanted acc before, you’ll know that acc is very responsive and noisy when it comes to measuring pitch and roll. It is possible to smooth out the data via sensor fusion. In this tutorial I will explain what data we will be getting from gyroscope, how to use the data to calculate pitch, roll and yaw and finally how to fuse sensor data with complimentary filter.










